Depuis la nuit des temps, l’Homme a cherché à imiter la nature. Honneur aux artistes : ce sont eux qui, au fond des grottes, ont été les premiers à représenter les animaux qu’ils rencontraient — avec un souci du détail parfois stupéfiant.
Au-delà de leur seule apparence, ils se sont aussi intéressés très tôt à leurs mouvements, à leurs caractéristiques physiques. Des ailes d’Icare aux machines volantes de Léonard de Vinci, il s’agissait de puiser dans l’observation des animaux les artifices qui permettraient à l’homme de s’affranchir de certaines de ses limites physiques.
Cette quête est bien loin de s’arrêter. Elle connaît même un sérieux coup d’accélérateur depuis quelques décennies. « Nous sommes à un stade où les chercheurs peuvent faire converger d’immenses progrès réalisés dans des disciplines autrefois séparées », estime Jan Kerschgens, directeur exécutif du Center for Intelligent Systems (CIS) à l’EPFL.
- Les robots qui font mouche – Pavan Ramdya parle de machines inspirées des insectes
- Décoder les unités de base de la nature
- La roboéthique de la biorobotique
- Jusqu’où ira la robotisation de l’humain ?
- Des robots mous pour épouser les formes
- Ce sera aux robots de s’adapter à nos sociétés
- Vers un organisme robotique biodégradable
- L’ère des machines biologiques

Illustration © Cornelia Gann
La révolutions des capteurs
Les progrès rapides de ces dernières années doivent beaucoup à la miniaturisation des microprocesseurs, au développement des nouveaux matériaux et aux algorithmes de plus en plus performants. « Ces derniers peuvent être exécutés en temps réel, en consommant très peu d’énergie — notamment grâce aux accélérateurs réseaux de neurones embarqués », précisent Adrian Ionescu et David Atienza, professeurs à l’EPFL. « Nous pouvons désormais embarquer des puissances de calcul phénoménales sans pour cela surcharger les appareils ou les rendre trop gros, reprend Jan Kerschgens. C’est cela qui nous permet aujourd’hui d’intégrer toutes sortes de capteurs — eux-mêmes de plus en plus performants — et de traiter l’information qu’ils reçoivent en temps réel. »
Les capacités de simulation, elles aussi démultipliées d’année en année, permettent en outre d’accélérer les processus. Plus besoin de construire d’innombrables prototypes voués à la destruction quand des « doubles virtuels » peuvent essuyer les plâtres à moindre frais, et beaucoup plus vite !
L’augmentation des capacités qui, pour les machines, découlent de ces nombreux progrès est simplement vertigineuse. Désormais capables de combiner des matériaux innovants, des composants électroniques surpuissants, leur propre source d’énergie et des capteurs qui perçoivent bien davantage que les sens humains, ces machines semblent aujourd’hui pouvoir évoluer presque sans aucune limite. Et les champs d’application, eux aussi, se multiplient en conséquence. De la voiture autonome aux robots-agriculteurs, des exosquelettes de renforcement aux drones de télécommunication, des prothèses robotiques aux humanoïdes d’aide aux personnes âgées, les machines se multiplient et se fondent toujours plus dans l’environnement et dans la société. Jusqu’à, parfois, devenir invisibles.
Illustration © Cornelia Gann
Nous pouvons désormais embarquer des puissances de calcul phénoménales sans pour cela surcharger les appareils ou les rendre trop gros”
La nature à la source
Une grande part des progrès constatés aujourd’hui se fonde encore, de près ou de loin, dans un développement qui s’inspire de la nature. Avec un schéma qui se reproduit presque à chaque occasion. Les scientifiques commencent par observer, voire disséquer, afin de comprendre les fondamentaux à l’œuvre dans les organismes biologiques — forcément optimisés puisque issus de millénaires d’évolution. Les travaux de Pavan Ramdya sur la rétro-ingénierie de la mouche drosophile (voir: Robots bio-inspirés : les robots qui font mouche) et aussi d’Auke Ijspeert sur la salamandre et la lamproie (voir: Biorobotique : décoder les unités de base de la nature) suivent cette démarche; mais aussi par exemple la compréhension fine du phénomène de la photosynthèse, qui a permis le développement des cellules solaires à colorants, par Michael Grätzel, de l’EPFL.
Vient ensuite la reproduction des phénomènes, sous réserve parfois de certaines limites technologiques — qui finissent presque toujours par sauter un jour ou l’autre. On peut penser à ce titre aux drones dont la forme imite celle des oiseaux et qui s’en retrouvent bien plus économes en énergie que les modèles courants : les rendre suffisamment légers, performants et « intelligents » pour qu’ils puissent éviter les obstacles ou voler en formation aurait été impensable il y a quelques années encore.
Réparer, améliorer
Ce processus s’applique aussi à l’ingénierie médicale. Le neuroscientifique de l’EPFL Grégoire Courtine rappelle à l’envi que c’est « grâce à plus de 15 ans de recherche extrêmement poussée pour comprendre le fonctionnement de la moelle épinière que nous pouvons aujourd’hui développer des implants capables de rétablir une transmission d’information entre le cerveau et des membres paralysés, en reproduisant les signaux électriques envoyés au système nerveux. » Des implants eux-mêmes basés sur des électrodes souples, développées par Stéphanie Lacour, elle aussi à l’EPFL, qui sont capables d’épouser fidèlement les fibres nerveuses de la colonne vertébrale. Encore une belle preuve de convergences des disciplines !
Si tous ces développements semblent encore relativement sectorisés, un constat s’impose néanmoins : il y a toujours plus de machines, et une pénétration toujours plus discrète de celles-ci dans l’écosystème naturel. Ce qui ne va pas sans poser de grandes questions, en particulier sur le plan sociétal ou écologique. D’où l’émergence de nouveaux domaines de recherche : robotique sociale (voir: Intégration sociale : « ce sera aux robots de s’adapter à nos sociétés »), robotique biodégradable voire… comestible (voir: Biologie : vers un « organisme robotique » biodégradable), et même développement de « machines biologiques » telles que des organoïdes fonctionnels ou des organismes de synthèse. Quelques étapes, et pas des moindres, restent encore à franchir jusqu’à la fusion de la machine et de la nature. Mais ses premiers signes sont déjà visibles. Ce qui dans certains cas — comme celui des prothèses — apparaît comme un atout évident peut aussi présenter une face plus sombre. Et imposera une vigilance accrue sur les questions d’éthique et de protection de la vie privée. ■
Nous pouvons aujourd’hui développer des implants capables de rétablir une transmission d’information entre le cerveau et des membres paralysés”
Des robots à voir
Les activités robotiques de l’EPFL se donnent à voir dans le cadre de BEAexpo, la Foire de Berne, du 29 avril au 8 mai 2022. « Living things @EPFL » rassemble 15 stands en français et en allemand et donneront aux visiteurs le goût de la recherche, en particulier autour de la robotique bio-inspirée.
Mouches, poissons, salamandre, lamproie et… fossile feront l’étalage des travaux visant non seulement à améliorer la robotique, mais aussi à mieux comprendre les mouvements des vertébrés. Plusieurs types de drones pourront également être découverts à cette occasion. Les fameux robots origamis du Laboratoire de robotique reconfigurable seront aussi de la partie.
Berne-Wankdorf, du 29 avril au 8 mai 2022.
Infos sur www.bea-messe.ch
Vous dites vouloir faire la rétro-ingénierie d’une mouche. Dans quel but ?
Notre objectif est de concevoir des systèmes autonomes, à même de se mouvoir dans le monde, de naviguer et de résoudre les problèmes les plus fondamentaux auxquels se heurtent les robots. C’est ce qui pousse mon laboratoire en avant : comprendre comment les systèmes biologiques (les animaux) relèvent ce défi en se déplaçant de manière autonome dans un environnement compliqué, en le manipulant, en bougeant d’un lieu à l’autre pour trouver de la nourriture et des partenaires, ou pour éviter la prédation.
Comment les organismes biologiques font-ils face à ces problèmes ?
Les systèmes biologiques ont exploité la possibilité de connecter ensemble des neurones pour exécuter des calculs qui permettent de les résoudre. Il y a toujours une information entrante dans le système, que ce dernier va traiter pour effectuer des calculs et envoyer des commandes motrices. C’est une question très complexe.
Comment approchez-vous votre objet d’étude ?
Mes enfants reviennent souvent de l’école avec des devoirs qui comportent des défis à relever. J’essaie de leur apprendre que, pour répondre à une question, il y a deux stratégies. En premier lieu, il faut se demander si le problème n’a pas été résolu auparavant, et s’en inspirer. En second lieu, il faut le diviser en unités plus petites et plus accessibles.
C’est mon approche scientifique. Premièrement, nous devons trouver une solution préexistante à un problème similaire. Ici, nous étudions Drosophila melanogaster, qui a évolué pour développer la capacité de se mouvoir à travers le monde, en toute autonomie, et effectuer des calculs sur la base des informations contenues dans son environnement. La mouche simplifie également le problème. Nous pourrions choisir l’humain ou le singe, mais ils ont bien plus de neurones, qu’ils utilisent pour relever d’autres défis, potentiellement plus complexes.
Mais les mouches peuvent accomplir des tâches très délicates avec leurs pattes, comme s’agripper, se battre, effectuer des rituels d’accouplement ou se mouvoir sur des terrains complexes. Donc, à mon sens, c’est un trésor de solutions pour les problèmes de la robotique, que nous pouvons approcher avec ce que nous appelons la rétro-ingénierie.

Prof. Pavan Ramdya, Directeur de
Firmenich Next-Generation Chair in Neuroscience à l’EPFL © Cornelia Gann

Quels sont vos outils de recherche ?
Dans les grandes lignes, il y a trois piliers. Premièrement, mesurer des comportements, deuxièmement, mesurer l’activité neurale et, troisièmement, concevoir des modèles informatiques de nos systèmes. Ces trois méthodes inscrivent les données dans un cadre synthétique, qui nous permet de nous demander si nous avons suffisamment de données, et tester si nous comprenons suffisamment notre système pour le reproduire in silico.
Ces cinq dernières années ont vu d’incroyables avancées dans le domaine du machine learning. En particulier les réseaux de neurones artificiels, qui rassemblent des informations issues de vidéos des mouvements des pattes des mouches, et s’entraînent pour retrouver de mêmes objets dans de nouvelles images et de nouvelles vidéos. Dans notre discipline, c’était une révolution. Cela nous permet de collecter et d’analyser des tonnes et des tonnes de données comportementales, ce qui était impossible auparavant.
Nous avons aussi collaboré avec le laboratoire de microrobotique de l’EPFL (l’équipe de Selman Sakar) pour construire des implants et des lucarnes dans le dos des mouches. Nous pouvons y implanter un dispositif qui écarte les tissus plutôt que d’avoir à les inciser, ce qui s’avère une gageure avec un animal long de deux millimètres. Avec la lucarne transparente sur le dos de l’insecte, nous pouvons faire passer l’animal sous le microscope plusieurs fois durant sa vie, et enregistrer à de nombreuses reprises les circuits neuronaux de la même mouche.
C’est vraiment un grand progrès, notamment parce que les systèmes biologiques sont intéressants en ce qu’ils sont adaptatifs. Si je construis un robot, sa programmation pourrait n’être pas aussi flexible face à un environnement fluctuant ou selon l’expérience accumulée. Mais dans les systèmes biologiques, les circuits neuronaux eux-mêmes s’adaptent constamment. Et nous pouvons visualiser comment ces circuits changent avec le temps.
A votre avis, quels sont les avantages de l’approche bio-inspirée en robotique ?
Pour faire se mouvoir un robot dans le monde de manière intelligente, nous pouvons démarrer à partir des principes premiers. Et c’est ce que l’on a fait pendant des années. Mais à mon sens, l’évolution a déjà résolu ce problème avec de très nombreuses espèces d’insectes. Donc, si l’on considère que les contraintes et les objectifs d’un système biologique ne sont pas si éloignés de ceux que l’on peut attendre d’un système robotique, l’approche bio-inspirée est pertinente. Elle nous permet d’exploiter les solutions mises au jour par l’évolution et de les appliquer aux problèmes analogues auxquels nous faisons face en robotique.
Allez-vous vous pencher sur des organismes plus complexes ?
Il faudrait encore définir ce que nous entendons par organismes complexes. Et ce que nous entendons, je suppose, c’est la complexité de la tâche, dont l’étude pourrait être intéressante pour utiliser des outils ou manipuler des objets, par exemple. Je ne considère pas nécessairement cela comme hors de portée des insectes. Par exemple, les abeilles peuvent accomplir des tâches vraiment remarquables en ce qui concerne la manipulation d’objets, dans leur environnement, pour accéder à des sources de nourriture.
Donc, plutôt que d’aller étudier des systèmes complètement différents, comme les mammifères, je pense que l’étude de plusieurs espèces d’insectes recèle encore de nombreuses opportunités. Nous voulons repousser les limites en termes d’exploration des capacités cognitives de la mouche. Le comportement quotidien de ces insectes présente des éléments remarquables que nous ne sommes pas même près de commencer à étudier. C’est pourquoi, dans mon domaine, on tente d’approcher des contextes plus pertinents du point de vue écologique, par exemple avec de multiples animaux ou des environnements complexes qui comportent des sources de nourriture et des objets manipulables. Ensuite, je pense que nous commencerons à voir les limites de l’architecture neurale des mouches. ■
Ces cinq dernières années ont vu d’incroyables avancées dans le domaine du machine learning. En particulier les réseaux de neurones artificiels, qui rassemblent des informations issues de vidéos des mouvements des pattes des mouches, et s’entraînent pour retrouver de mêmes objets dans de nouvelles images et de nouvelles vidéos.”
Marqué par la période suivant la révolution industrielle, l’esprit de Frank Hornby aurait pu concevoir l’existence des robots. Mais n’aurait certainement pas pu imaginer les incroyables avancées contemporaines en robotique bio-inspirée. Au Laboratoire des systèmes intelligents de l’EPFL, le professeur Dario Floreano défriche les futurs chemins de l’IA et de la robotique, à la croisée de la biologie et de l’ingénierie, des humains et des machines. « J’ai une fascination d’enfance pour les solutions inventives de la nature. Elles sont extrêmement efficaces face à de nombreuses situations, explique-t-il. Ce qui m’intéresse particulièrement, c’est la capacité des organismes vivants à utiliser des mécanismes économes et adaptatifs. Je me tourne donc vers la nature comme source d’inspiration, pour trouver de nouvelles ou de meilleures réponses aux problèmes complexes de la robotique. »
Pendant plus d’une décennie, Dario Floreano a travaillé sur des drones bio-inspirés. Dans un projet en cours, il tente de reproduire l’agilité et l’endurance des oiseaux de proie. Ce n’est pas chose facile pour les drones actuels. Ils sont conçus soit pour être agiles (comme les quadroptères et multicoptères) soit pour être endurants (comme les drones ailés). Ses collègues de laboratoire développent une nouvelle génération de drones qui conjugue ces deux qualités en s’inspirant des rapaces.
« Nous avons fabriqué des ailes et une queue avec des plumes artificielles qui peuvent se tordre et se plier, afin de changer rapidement de direction, d’économiser l’énergie et de voler dans des conditions diverses de vitesse et de vent, mieux que les drones ailés traditionnels. De plus, nous nous inspirons également des membres des oiseaux pour atterrir, se percher, saisir des objets, mais aussi marcher ou décoller du sol (autant de capacités dont les drones ailés actuels sont dénués) », explique Dario Floreano.
Nous avons fabriqué des ailes et une queue avec des plumes artificielles qui peuvent se tordre et se plier”
Apprendre aussi des robots
Dans le laboratoire voisin de biorobotique, son directeur, le professeur Auke Ijspeert, est fasciné par la locomotion animale. En ce moment, le domaine de la biorobotique traverse une phase incroyablement stimulante, dit-il. « Même si les animaux ne sont pas parfaits, ils n’en sont pas moins impressionnants. Avec leurs aptitudes à se mouvoir sur tant de terrains différents, cela fait sens de s’en inspirer pour concevoir de meilleurs robots. Mon laboratoire utilise la notion de robot comme modèle physique pour tester des hypothèses sur la locomotion animale. C’est une approche pertinente à la fois en neurosciences et en biomécanique. »
« Je me penche sur le système musculo-squelettique et la moelle épinière. Ils comportent deux éléments principaux, à savoir une boucle de rétroaction sensorielle et de très intéressants réseaux neuronaux qui produisent spontanément des schémas rythmiques. Avec la robotique, qui est par définition l’art d’intégrer des composants multiples, nous pouvons vraiment aider à décoder les interactions de toutes ces unités de base », explique-t-il.
Le célèbre robot-salamandre d’Auke Ijspeert, à même de marcher et de nager, était contrôlé par des modèles mathématiques de la moelle épinière de cet animal. Plus récemment, des travaux internationaux, pilotés par son équipe, ont exploré le rôle de la boucle de rétroaction (qui provient du système nerveux périphérique), en plus des oscillateurs neuraux (qui sont des éléments du système nerveux central), afin de mieux comprendre la dynamique complexe et intriquée des systèmes nerveux.
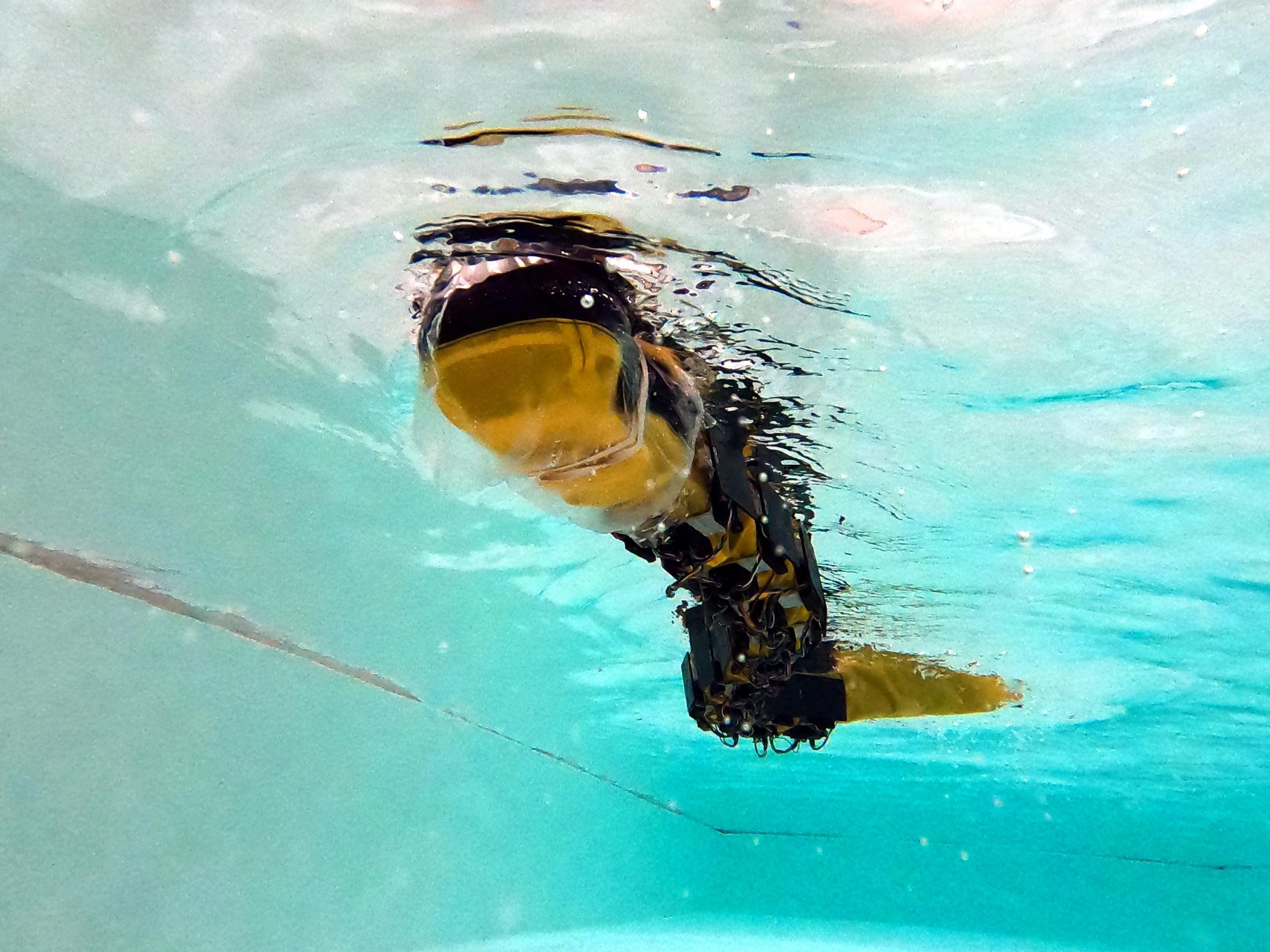
AgnathaX est un long robot-nageur, ondulant, conçu pour rappeler la lamproie. Il contient une série de moteurs qui animent ses 10 segments en imitant les muscles le long du corps de l’animal. L’équipe a appliqué des modèles mathématiques alors que le robot nageait. Elle a sélectivement activé et désactivé les composants des systèmes nerveux centraux et périphériques à chaque segment.
« Nous avons découvert que les systèmes nerveux centraux et périphériques contribuent à générer une locomotion robuste en travaillant de concert. En s’appuyant sur une combinaison de composants centraux et périphériques, le robot pouvait résister à un grand nombre de perturbations neurales et continuer de nager à haute vitesse, au contraire des robots qui n’exploitaient qu’un type de composant. Cette étude est intéressante en ce qu’elle permet d’expliquer pour la première fois pourquoi certains animaux, comme les anguilles, sont étonnamment résilients face aux lésions de la moelle épinière », explique Auke Ijspeert.
Nous avons découvert que les systèmes nerveux centraux et périphériques contribuent à générer une locomotion robuste en travaillant de concert”
Plus que de simples automates
Tandis que la biorobotique aide à concevoir de meilleurs robots, à l’inverse, les robots bio-inspirés peuvent contribuer à percer certains des plus grands mystères de l’évolution et de la biologie. Ce thème passionne Dario Floreano et Auke Ijspeert.
« On pense souvent que de simples insectes, comme les mouches des fruits, sont des automates qui répondent à des stimuli externes ou qui, sinon, se meuvent de manière aléatoire. Mais en observant leur comportement avec mes collègues Pavan Ramdya et Richard Benton, nous avons réalisé qu’ils effectuent des mouvements plus complexes, explique Dario Floreano. Nous avons donc utilisé du machine learning pour déterminer quel était le nombre minimal de neurones requis pour imiter avec exactitude les mouvements de ces insectes dans une simulation informatique. Nous avons découvert un circuit neural spécifique qui pourrait être utilisé par ces animaux. C’est un autre exemple qui montre à quel point ce domaine peut être fascinant. »
Auke Ijspeert entretient un grand rêve pour l’avenir. Inconditionnel du joueur de tennis star Roger Federer, il est fasciné par l’apprentissage des capacités motrices, ainsi que par la relation entre le corps, l’entraînement et le système nerveux, qui fonctionnent ensemble pour atteindre de telles incroyables performances.
« En neurosciences, deux communautés étudient les contrôles des mouvements : celle du cortex moteur et celle de la moelle épinière. Mais peu de gens travaillent à l’interface de ces deux domaines, explique Auke Ijspeert. Nous avons des fonds pour exploiter des robots et notre modèle de moelle épinière, afin d’enquêter sur les interactions entre les fonctions supérieures du cerveau et la moelle épinière dans l’apprentissage et la planification du mouvement chez les animaux. Nous ne comprenons pas encore comment les régions supérieures du cerveau profitent des actions de la moelle épinière. Pour nombre d’entre nous, les neurosciences restent un mystère. Avec mes robots, j’aimerais résoudre celui de l’apprentissage moteur. » ■
Nous avons donc utilisé du machine learning pour déterminer quel était le nombre minimal de neurones requis pour imiter avec exactitude les mouvements de ces insectes dans une simulation informatique”
IA au commencement était le verbe
Pourrions-nous prédire le futur des technologies bio-inspirées à partir de la manière dont nous enseignons aux machines à comprendre comment le cerveau comprend le langage ?
Antoine Bosselut, professeur assistant à la Faculté d’informatique et communications (IC), dirige le nouveau groupe de l’EPFL en traitement du langage naturel (NLP, pour natural language processing). Cette discipline est consacrée aux interactions entre ordinateurs et langage humain.
A l’avenir, l’intelligence artificielle et les neurosciences vont-elles aider ces mêmes machines à développer une forme de bon sens et à saisir comment les humains pensent
et ressentent ?
La génération actuelle de modèles en machine learning, généralement la forme dominante d’algorithme en usage dans les travaux de NLP, est inspirée du cerveau. Elle repose sur ce que nous appelons des réseaux de neurones artificiels. A l’origine, dans leurs premières formes, nous savons qu’ils étaient inspirés d’une architecture analogue au cerveau : des neurones qui traitent les informations, et des synapses qui transfèrent les informations d’un neurone à l’autre. Mais dans la plupart des cas, la métaphore s’arrête là.
Avec les rapides développements de la recherche, la situation est-elle en train d’évoluer ? Les réseaux de neurones artificiels se rapprochent-ils de leurs homologues biologiques ?
Certaines personnes continuent à développer de nouveaux algorithmes de réseaux de neurones artificiels en exploitant certaines des propriétés que l’on observe en neuroscience. Il s’agit de se rapprocher de la manière dont le cerveau traite les informations, et de mieux comprendre le cerveau. En traitement du langage naturel, on peut indirectement utiliser le cerveau comme une source d’inspiration quant à la manière dont on pense que les machines devraient comprendre le langage. Par exemple, comment le cerveau transmet les informations, ou comment nous raisonnons en tant qu’humains.
Est-ce que nous atteindrons un moment où les machines penseront comme notre cerveau et où il pourrait y avoir des machines biologiques ou hybrides ?
L’avocat du diable en moi demanderait plutôt s’il s’agit vraiment de ce que nous voulons. Cette question soulève quelques problèmes d’éthique des machines. L’un d’entre eux se formule ainsi : si nous modélisons véritablement une machine avec un cerveau humain, comment saurons-nous qu’elle n’est pas humaine ? De manière plus réaliste, même si vous pouvez concevoir des mécanismes similaires à ceux qui permettent au cerveau d’apprendre, il n’est pas forcément évident de savoir si cela va apprendre exactement les mêmes choses qu’un humain sans partager les mêmes expériences.
La roboéthique est un domaine qui en est encore à ses balbutiements pour ce qui touche aux défis éthiques qui se posent avec les robots – qu’il s’agisse des menaces qu’ils peuvent représenter pour les humains, de leur conception et/ou de leurs utilisations et de la manière dont nous devons nous comporter à leur égard. Dario Floreano et Auke Ijspeert, deux professeurs de l’EPFL travaillant dans ce domaine, livrent leurs réflexions sur les risques et dangers potentiels liés à leur travail.
Professeur Dario Floreano
Si l’on a peur de machines à la Frankenstein se contrôlant elles-mêmes, rassurez-vous, il n’y a rien à craindre avec ces robots. Rien du tout. Ce ne sont qu’un autre type de machines, dont la conception mécanique et l’intelligence artificielle sont plus efficaces lorsqu’elles agissent dans le monde réel. Mais il y a en effet des questions éthiques qui se posent quant à la manière dont nous recueillons des données à partir de l’animal, et peut-être y a-t-il des expériences qui ne devraient pas être faites simplement dans le but de concevoir un meilleur robot. Par exemple, dans le cas de nos drones d’inspiration aviaire, nous avons étudié et conçu des plumes artificielles au lieu d’utiliser des plumes d’oiseaux.

Prof. Dario Floreano, Directeur du Laboratoire des systèmes intelligents à l’EPFL
Professeur Auke Ijspeert
Le risque, c’est toujours le double usage, c’est-à-dire le risque qu’un robot soit utilisé à des fins militaires. Notre robot amphibie pourrait être immédiatement transformé en arme, et donc le risque de transformer tous nos robots en armes m’inquiète. Je crains que les pays techniquement avancés mènent des guerres en utilisant des robots, et que ces guerres deviennent pour eux comme des jeux vidéo, avec des coûts humains énormes pour des parties adverses moins avancées. L’ensemble de la société doit être conscient de ces risques et y réfléchir, et nous devons commencer à envisager une mise à jour des Conventions de Genève. De telles questions éthiques en robotique commencent à être discutées, mais cela demeure encore marginal; or, je pense que c’est assez urgent.

Prof. Auke Ijspeert, Responsable du Laboratoire de biorobotique à l’EPFL
Petit à petit, les solutions d’assistance robotisée à la mobilité des personnes handicapées, prothèses bioniques ou exosquelettes, sortent des laboratoires, laissant entrevoir une réalité qui dépasse progressivement la fiction. Pour Mohamed Bouri, chef du groupe de recherche Réhabilitation et robotique d’assistance de l’EPFL, ce n’est d’ailleurs déjà plus une nouveauté. « Cela fait plus de 10 ans que la technologie derrière les exosquelettes existe, précise-t-il. Ils étaient principalement développés pour la rééducation en clinique. Maintenant, le but est de les améliorer pour les activités quotidiennes. » Son équipe a ainsi développé TWIICE ONE, un dispositif d’assistance à la marche pour personnes atteintes de paraplégie utilisable dans la vie de tous les jours et aujourd’hui mis sur le marché via une start-up. Mais les exosquelettes ne se limitent déjà plus au contexte médical, rappelle-t-il. De plus en plus de ces dispositifs sont en effet développés pour aider les ouvriers dans leurs travaux quotidiens, à l’instar des modèles de Noonee, start-up de l’ETHZ.
Les prothèses bioniques ne sont pas en reste. En 2014 déjà, la danseuse Adrianne Haslet-Davis réalisait quelques pas de danse sur la scène d’une conférence TED à Vancouver, équipée d’une jambe robotisée. Depuis, cet exploit technique a ouvert la voie à de nouvelles perspectives comme rendre toujours plus précis le contrôle des prothèses ou leur redonner certaines capacités sensorielles.
Mettre les coûts en perspective
Mais cet objectif, qui permettrait au patient de mieux ressentir son environnement et d’améliorer ses capacités motrices et sur lequel travaillent plusieurs équipes du Laboratoire d’ingénierie neuronale translationnelle (TNE) de l’EPFL, vient avec son lot de défis. « Cette technologie implique entre autres d’implanter des électrodes directement sur les nerfs du patient, précise Solaiman Shokur, docteur en neuro-ingénierie et chercheur senior au TNE. Dès lors, comment mettre à jour ces implants lorsque leur technologie sera obsolète ou qu’ils auront perdu en efficacité du fait, par exemple, de réactions immunitaires ? Vaudra-t-il mieux réopérer tous les trois ou quatre ans, malgré la lourdeur de ce type de chirurgie, ou laisser en place une technologie vieillissante ? »
A la question de la mise à jour du matériel implanté, Solaiman Shokur en ajoute une autre : « Parfois, quand on présente ce genre d’avancée, on montre une jolie vidéo du patient avec le prototype avant de montrer qu’il y a dans la même pièce plusieurs ingénieurs et docteurs et surtout un imposant ordinateur pour faire fonctionner l’appareil. Les recherches en neuro-ingénierie sont maintenant de plus en plus concentrées sur « sortir les neurotechnologies du laboratoire », en permettant aux patients de les utiliser à la maison. »
Le prix de ces dispositifs est également encore élevé, mais devrait baisser dans les prochaines années selon l’ingénieur, notamment avec les économies d’échelle. Il estime en effet que le nombre grandissant de patients ainsi équipés devrait faire baisser les coûts, en particulier sur la recherche et le développement. Il propose également de mettre en perspective ces coûts par rapport à ce que peuvent apporter ces technologies : « La viabilité d’une solution technologique va dépendre de son potentiel clinique et économique. Le coût d’une technologie qui permettrait, par exemple, à un patient de récupérer les fonctions de sa main, lui permettant une plus grande autonomie dans la vie de tous les jours, est à mettre dans la balance avec le coût des traitements et de l’aide dont a besoin ce patient, comme par exemple si ce patient a constamment besoin d’une personne tierce pour ses tâches quotidiennes comme manger ou s’habiller. »
La viabilité d’une solution technologique va dépendre de son potentiel clinique et économique.”
Encore loin du transhumanisme
Reste à changer les regards sur ces dispositifs et à rassurer sur les risques de dérives. Pourrait-on voir ces recherches aboutir à des humains aux capacités supérieures, voire des métiers réservés à cette nouvelle catégorie de travailleurs, comme on peut le voir dans certaines œuvres de fiction ? Dominique Kunz Westerhoff n’y croit pas. Professeure à la Faculté des lettres de l’Université de Lausanne, elle dispense à l’EPFL le cours Hommes/machines sur les enjeux de l’hybridation entre l’humain et la machine à différentes échelles. Elle détaille sa pensée : « Il faut voir la réalité médicale, qui est aux antipodes d’une telle considération. Dans cette réalité, contrainte par les critères de prise en charge des assurances sociales, c’est le principe du moindre traitement efficace qui domine, où on ne cherche justement pas à apporter plus au patient que ce qu’il a perdu, mais à restaurer son autonomie et à limiter les risques. »
Voulant lui aussi tordre l’image de l’humain enfermé dans une machine, Mohamed Bouri et son équipe travaillent de plus en plus sur l’ergonomie et le design de leurs exosquelettes. Il précise : « Cela reste un équipement, même pour les exosquelettes utilisables par des ouvriers. Nous sommes bien loin de l’idée d’un transhumanisme ou d’une augmentation de l’humain. Nous visons principalement à assister des personnes qui en ont besoin. » ■
Nous visons principalement à assister des personnes qui en ont besoin”
Le robot mou le plus connu est Octobot, une pieuvre conçue par l’université de Harvard. L’engin n’est composé que de matériaux et d’électronique mous. A l’EPFL, plusieurs laboratoires se sont spécialisés dans le développement de robots qui possèdent un certain degré de souplesse, voire de mollesse. « Lorsque l’on évoque les robots mous, il est clair qu’il s’agit seulement d’une partie et non de l’entièreté. Les actionneurs sont fabriqués avec des matériaux comme le silicone. Le reste de la machine, notamment la source d’alimentation, demeure composé d’éléments solides », explique Herbert Shea, professeur et directeur du laboratoire des transducteurs mous. Les scientifiques qui conçoivent ce genre de robot visent avant tout des applications médicales. C’est le cas de la professeure et directrice du Laboratoire pour les interfaces bioélectroniques souples Stéphanie Lacour. Son équipe développe des capteurs intégrés à des supports mous afin de les utiliser dans ou sur le corps humain. « Imaginez que nous ayons besoin d’un dispositif à placer sur le cerveau pour recueillir certaines informations retransmises au neurologue. Le système doit être maniable et malléable pour s’adapter à la topologie de chaque organe », explique la professeure.
Adaptable, flexible et sécuritaire
L’avantage d’une machine ou d’un dispositif mou est justement qu’il peut se situer n’importe où sur ou dans le corps : cœur, cerveau, intestins, peau, mains. « Ces dispositifs mous s’ajustent à la biologie et non l’inverse », déclare Stéphanie Lacour. Ainsi, les robots mous possèdent de nombreux atouts en plus de leur adaptabilité. Un exosquelette qui se place sur le corps et épouse sa morphologie peut soutenir un ouvrier ou un sportif. Une personne amputée peut bénéficier d’une prothèse qui ressemble et fonctionne comme son membre manquant. Étant donnée leur souplesse, les robots mous peuvent aussi être reconfigurés pour d’autres tâches, être modelés à l’infini. Leur adaptabilité s’avère intéressante pour évoluer dans des environnements changeants. Pour finir, les robots mous sont également appréciés pour leur sécurité. « Etant donné qu’ils possèdent peu de force, l’interaction avec les humains est plus sûre », relève Herbert Shea. Cependant, ce dernier point peut se révéler un inconvénient. Si la machine génère peu de puissance, il lui devient difficile de contrôler sa forme puisqu’elle est par essence déformable. « Les matériaux employés sont souvent fragiles, à l’instar du silicone qui peut se dégrader si la chaleur est trop élevée, durcir ou se casser en fonction de l’humidité ou de l’environnement gazeux, prévient Stéphanie Lacour. Il reste de gros progrès à effectuer en ce qui concerne les matériaux. Il nous faut explorer la chimie et la biologie pour en trouver de plus performants. »
Souplesse des mouvements
Qui dit robots mous ne dit pas forcément matière souple. Le mouvement peut, lui aussi, être mou, voire doux. Cela dépend de la quantité d’articulations que va posséder le robot. Les robots origamis de Jamie Paik, professeure et directrice du Laboratoire de robotique reconfigurable, s’avèrent justement dotés d’un grand nombre d’articulations. Cela leur permet d’effectuer des mouvements plus souples et de bénéficier d’un plus vaste degré de liberté même s’ils sont composés de matériaux rigides. « Si nous réussissons à atteindre un niveau d’agilité qui s’adapte aux gestes, le robot peut alors exécuter plus de tâches et mieux s’accommoder à son environnement », explique la chercheuse. Elle reconnaît cependant que plus le robot possède d’articulations, plus il est fragile.
Jamie Paik, Stéphanie Lacour et Herbert Shea ne conçoivent toutefois pas que les robots mous pourront un jour remplacer les organes. « On souhaite plutôt développer des appareils qui stimulent le muscle ou l’organe en question afin de le faire fonctionner normalement », affirme ce dernier.
La première conférence internationale sur la robotique molle s’est tenue en 2011, preuve que le domaine reste relativement récent. Il nécessite un haut niveau d’expertise dans toutes les branches de l’ingénierie, des connaissances en matériaux, en passant par l’électronique et la mécanique. L’interdisciplinarité s’avère l’élément clé pour faire évoluer les robots mous vers des horizons inexplorés. ■
Si nous réussissons à atteindre un niveau d’agilité qui s’adapte aux gestes, le robot peut alors exécuter plus de tâches et mieux s’accommoder à son environnement”
Ne pas traverser dans un groupe de personnes en train de converser. Laisser passer une personne âgée ou chargée. Laisser les gens sortir de l’ascenseur avant d’y entrer. Garder sa droite quand on marche sur un trottoir… Ces règles acquises sont l’expression d’un consensus social et sont en principe comprises et appliquées par le groupe. Un Britannique ou une Japonaise privilégiera en revanche le côté gauche du trottoir. Et un robot ? Comment saura-t-il quelle règle respecter ? Que comprendra-t-il quand on lui fera les gros yeux pour nous laisser sortir de l’ascenseur ? A l’heure où les robots sont de plus en plus appelés à intervenir dans notre environnement et à interagir avec nous, pour être acceptés et remplir leur fonction il est nécessaire qu’ils comprennent la façon dont les humains communiquent, sachent lire nos intentions et respectent nos normes sociales. Bien au-delà de l’apparence, les groupes de recherche travaillent désormais activement sur l’intelligence sociale des robots.
Les applications dans lesquelles un robot peut intervenir sont très diverses, que ce soit pour les voitures autonomes, l’aide aux personnes âgées ou en situation de handicap, la livraison ou autre chose. Le plus souvent, un humain est traité par le robot comme un simple objet avec une taille et une position données. « Le défi consiste à créer une intelligence artificielle qui inclut l’intelligence sociale et l’éthique », résume Alexandre Alahi, professeur au Laboratoire des systèmes de transport intelligents (VITA) à l’EPFL. « Les robots doivent s’adapter aux spécificités de nos sociétés et des individus de la manière la plus naturelle et transparente possible, sachant que les règles sociales ne sont pas toujours explicitement définies ou reposent sur des conventions apprises inconsciemment et qui varient d’une culture à l’autre. »
Miser sur l’expérience
Comment faire ? Schématiquement, les scientifiques inculquent au robot non seulement les lois de la physique, mais aussi lui fournissent des exemples et des cas spécifiques afin que, comme nous, il acquière de l’expérience — par l’apprentissage automatique. « C’est comme lorsque l’on apprend à conduire, détaille le professeur. On peut mémoriser le Code de la route par cœur mais nous n’arriverons pas à conduire sans une mise en pratique de la théorie, sans l’expérience de la route. C’est cette expérience qui nous enseigne les règles sociales de la conduite, quelles décisions prendre autour de la place de l’Etoile à Paris, à New Delhi ou à Bangkok. C’est cette expérience qui nous permettra d’apprendre les subtilités du trafic. Nous cherchons à faire la même chose avec les robots (ici les voitures autonomes). Coder dans un robot les règles de la route ne suffit pas. Le robot doit apprendre de l’expérience des usagers de la route, de leurs comportements, les subtilités de la mobilité. Nous utilisons l’apprentissage automatique pour cela.»
Dans la perspective d’une multiplication des véhicules autonomes, plusieurs recherches du laboratoire VITA se concentrent sur les piétons, qui par essence peuvent avoir des comportements imprévisibles et erratiques. Il utilise ainsi toutes sortes d’outils technologiques (caméra, vision par ordinateur, apprentissage automatique…) pour suivre et modéliser (tracking) le comportement des piétons. A partir d’une seule image, le laboratoire a réussi à déterminer 32 attributs d’un piéton : un adulte, marchant doucement, avec un sac à droite, seul, regardant à droite, en train de téléphoner… afin de modéliser son langage corporel. « Ensuite, il s’agit de prédire son comportement sur la base de ce qui est perçu. La machine cherche à prédire ce que la personne
Le robot doit apprendre de l’expérience des usagers de la route”
Prévoir l’imprévisible
Dans 95% des cas, les individus ont un comportement linéaire et prédictible en fonction de toutes ces données. Ils ne font pas d’erreur, que ce soit au volant ou à pied. « Mais le nerf de la guerre est de pouvoir prévoir les cas exceptionnels où le libre arbitre de l’individu fera qu’il décide de traverser une rue ou de s’arrêter au milieu de la chaussée… C’est dans les cas exceptionnels que la machine doit faire aussi bien que l’humain et que l’on mesure ses performances, poursuit Alexandre Alahi. Dans ces situations, il est primordial que l’humain et la machine interagissent de manière sûre. »
Et si cela échoue ? La tolérance à l’erreur à l’égard des robots est plus faible que vis-à-vis de l’humain. « Dans tout service il y a une probabilité d’erreur, rappelle le chercheur. Quand on prend un médicament comme quand on prend l’ascenseur ou l’avion. La question est de savoir quelle est la probabilité qui nous permettra d’accepter le service pour le gain qu’il procure. Nous devons être plus exigeants avec la technologie. Son rôle est d’assister et de réduire les erreurs humaines.»
C’est ce que fait également le Laboratoire des systèmes intelligents et algorithmes distribués de l’EPFL qui s’est intéressé aux interactions entre les humains et un groupe de robots. « C’est un peu comme la rencontre entre deux civilisations ! Jusqu’à présent les robots effectuent des tâches dans des environnements protégés séparés des humains, rappelle le directeur Alcherio Martinoli. Mais on peut imaginer qu’un jour il soit nécessaire de réellement travailler ensemble dans un même espace. On passe alors d’un environnement dédié à un environnement contrôlé, qui reste organisé et respectueux des règles de bonne conduite mais en intégrant une « espèce » de plus, celle des robots. »
Le défi pour ces chercheurs est non seulement d’anticiper les relations avec les humains, mais aussi la coordination entre robots compte tenu de la présence des humains. Des questions aussi triviales que la qualité du réseau deviennent déterminantes. Si un robot se trouve soudain dans une zone blanche, il perd le contact avec ses pairs et la coordination avec le reste du groupe, ce qui pourrait poser des questions de sécurité. Cet exemple montre que la « socialisation » des robots est loin de ne concerner que les spécialistes de la robotique et de l’intelligence artificielle. Nombre de technologies entrent en ligne de compte, auxquelles s’ajoutent les aspects sociologiques et psychologiques. Mais l’ultime question est de savoir si nos sociétés sont prêtes à cohabiter avec des robots. ■
Nous devons être plus exigeants avec la technologie. Son rôle est d’assister et de réduire les erreurs humaines”
Quand des robots discutent avec des animaux
Pourrions-nous prédire le futur des technologies bio-inspirées à partir de la manière dont nous enseignons aux machines à comprendre comment le cerveau comprend le langage ?
par Sarah Perrin
A priori, poissons et abeilles n’ont ni l’occasion de se rencontrer, ni grand-chose à se dire. Dans le cadre d’un projet européen, des chercheurs de l’EPFL réussissaient pourtant il y a deux ans à faire interagir les deux espèces, à distance et au moyen de la robotique. L’un à Lausanne et l’autre en Autriche, les deux groupes d’animaux ont échangé des signaux et progressivement coordonné leurs décisions. Cette expérience a depuis permis des développements intéressants directement dans l’environnement naturel des abeilles.
Les chercheurs ont commencé par mettre au point un petit robot « espion » qui, une fois introduit au sein d’un groupe de poissons-zèbres, avait pu le convaincre de nager dans un sens ou dans l’autre d’un aquarium circulaire. Quelque temps plus tard, ce même robot et son groupe de poissons ont été mis en contact avec des abeilles, installées dans un laboratoire autrichien et sur un plateau muni de plusieurs bornes robotiques fixes, autour desquelles les insectes ont naturellement le réflexe de s’agglutiner.
Des signaux spécifiques à chaque espèce ont été envoyés aux animaux: notamment des accélérations, vibrations et mouvements de la queue pour le robot poisson; des vibrations, variations de température et souffles d’air passant par les bornes pour les abeilles. Dans chaque groupe, les individus ont réagi, les poissons optant pour un sens de nage et les abeilles pour le regroupement autour d’une borne. Chacune de ces dynamiques de groupe était enregistrée par le robot, qui les envoyait à son tour à celui de l’autre communauté, celui-ci les traduisant en signaux propres à l’espèce dans lequel il était immergé.
Chaotiques au départ, les échanges entre les deux groupes ont peu à peu abouti à une certaine harmonie, les poissons tournant dans le sens inverse des aiguilles d’une montre et les abeilles se regroupant autour d’une seule borne. Dans le processus, les deux espèces ont même échangé un peu de leurs caractéristiques, les abeilles se montrant plus remuantes que de coutume, et les poissons tendant à se grouper plus qu’ils ne le feraient naturellement.
Pour les roboticiens, cette expérience est intéressante pour déterminer comment des signaux biologiques peuvent être captés puis traduits par une machine. Pour les biologistes, elle permet de mieux comprendre les comportements animaux et le fonctionnement des interactions au sein des écosystèmes.
Ces expériences sont, depuis, passées du laboratoire à l’environnement naturel des abeilles. Menés au sein d’un nouveau consortium européen nommé Hiveopolis, les travaux concernent surtout la mise en place d’une ruche intégrant ces technologies. Plusieurs approches sont étudiées. L’une d’elles consiste à tester comment la diffusion de chaleur influence le lieu où les larves sont élevées, ou encore où le miel est stocké. Une autre piste vise à intercepter, par des vibrations, la danse des abeilles pollinisatrices incitant à se diriger vers des champs traités avec des pesticides. Ces méthodes ont pour but de réduire l’impact de ces polluants sur les insectes et de préserver le bien-être de ces animaux si essentiels dans la chaîne alimentaire. ■
Recycler et réutiliser. Pour la robotique, le défi est d’autant plus grand que les matériaux utilisés sont le plus souvent rigides, complexes et parfois toxiques. Et récupérer un robot n’est pas toujours une mince affaire ; la planète Mars en sait quelque chose. A moins que l’on donne au robot un cycle de vie complet dont il est lui-même l’acteur. Il naît, vit pour accomplir sa tâche et meurt à l’instar d’un organisme biologique. En pleine effervescence depuis une décennie, le domaine de la robotique souple avance des pistes prometteuses pour créer des « organismes robotiques », intelligents et autonomes, et ultimement biodégradables.
Jonathan Rossiter, directeur du Groupe de robotique souple à l’Université de Bristol et partenaire du projet RoboFood (voir encadré plus bas), est un des pionniers de l’idée d’organisme robotique. Il considère le robot comme un organisme doté d’un corps, d’un estomac et d’un cerveau. Le premier doit contenir l’organisme et fournir des moyens de locomotion et des mécanismes internes. L’estomac convertit l’énergie environnementale en une forme utilisable par l’organisme, et le cerveau contrôle le système de l’organisme, la régulation homéostatique, les commandes sensorielles et motrices, le raisonnement et le comportement orienté vers un but.
Pour être « environnementalement compatible », cet organisme robotique doit en dernier lieu s’insérer dans une chaîne alimentaire naturelle afin de disparaître sans laisser d’empreinte. Ses composants doivent donc être biodégradables. Plusieurs équipes, y compris le Laboratoire des systèmes intelligents à l’EPFL, utilisent pour ce faire des polymères et des biopolymères qui sont biodégradables et non toxiques pour l’environnement. Il s’agit par exemple du collagène, de la gélatine ou de la cellulose. Certains plastiques sont aussi biodégradables tels que le PLA (acide polylactique) ou le PCL (polycaprolactone). Facilement disponibles, ces matériaux réduisent les pressions sur les ressources tout en étant capables de se dégrader en toute sécurité dans l’environnement.
Un estomac artificiel
Afin que l’organisme fonctionne, se déplace, il faut rendre intelligents ces polymères et les doter d’actionneurs et de senseurs qui eux-mêmes doivent être biodégradables. Des polymères électroactifs permettent ainsi de transformer l’énergie électrique en énergie mécanique. A l’EPFL, plusieurs laboratoires tels que le Laboratoire de microsystèmes 1 ou le Laboratoire des transducteurs souples travaillent à la miniaturisation des actionneurs polymères souples, l’électronique et les microsystèmes biodégradables et biorésorbables.
Reste à fournir une source d’énergie à ces robots organiques qui doit être elle-même durable. La question intéresse surtout les chimistes qui cherchent les moyens de tirer directement cette énergie d’un environnement pas toujours propice tels qu’une grotte, des fonds marins ou le corps humain. Les piles à bactéries (microbial fuel cell ou MFC), qui utilisent des bactéries pour transformer l’énergie chimique de matières organiques en énergie électrique, constituent une piste intéressante. Le Laboratoire de nanobiotechnologie de l’EPFL travaille par exemple à augmenter la production d’électricité des MFC grâce à la nanotechnologie. D’autres équipes se concentrent sur leur biocompatibilité : des chercheurs de la Carnegie Mellon University ont mis au point une MFC faite d’une cathode en mélanine et une anode en oxyde de manganèse. Elle fonctionne avec les sucs gastriques de l’estomac, qui provoque l’électrolyse de la même façon que les lampes des gilets de sauvetage s’allument au contact de l’eau. Des recherches visent aussi à « nourrir » l’estomac artificiel du robot de polluants néfastes (algues nuisibles, hydrocarbures, plastiques, etc.), le rendant non seulement inoffensif pour l’environnement, mais carrément bénéfique.
Un travail interdisciplinaire
Même s’il reste de nombreux défis à relever, la robotique souple bio-inspirée est séduisante : ces robots peuvent être fabriqués rapidement, pour un coût relativement modeste, déployés par centaines et, bien sûr, il n’est pas nécessaire de les récupérer. Que ce soit pour des applications biomédicales, environnementales, de la surveillance à la détection, pour leur durabilité, leurs performances ou les deux. « L’intégration efficace d’actionneurs, de capteurs, de calcul et d’énergie dans un seul robot nécessite de nouveaux concepts et des solutions écologiques. Elle sera possible uniquement si les spécialistes des matériaux, les chimistes, les ingénieurs, les biologistes, les informaticiens et les roboticiens unissent leurs forces », avancent les chercheurs autrichiens Florian Hartmann, Melanie Baumgartner et Martin Kaltenbrunner, dans un article paru cette année dans Advanced Materials.
Enfin, pour Jonathan Rossiter, ces organismes robotiques atteindront leur apogée quand ils seront capables de se reproduire. « Le prochain défi dans ce domaine est de combiner les différents composants et capacités des robots mous pour créer un protoorganisme. Ensuite, des comportements biologiques plus sophistiqués seront développés, y compris l’autoréplication et la reproduction. Cela permettra véritablement un nouveau monde d’organismes robotiques mous « vivants » », souligne-t-il dans un article publié au début de l’année dans
Artificial Life and Robotics. ■
Ces organismes robotiques atteindront leur apogée quand ils seront capables de se reproduire”
Pourra-t-on un jour manger des robots ?
Pourra-t-on un jour manger des robots ?
En octobre 2017 à Vancouver, lors de la grand-messe internationale de la robotique, la conférence IROS, une présentation du Laboratoire des systèmes intelligents (LIS) de l’EPFL a fait sensation. Le groupe du professeur Dario Floreano y a présenté une pince robotique faite de gélatine, de glycérine et d’eau, entièrement comestible. Jusqu’à cette date, les scientifiques avaient bien fabriqué des transistors, des électrodes, des condensateurs, des batteries ou des capteurs pouvant être ingérés sans danger, mais jamais
un véritable robot tel que cet actuateur capable d’effectuer une tâche.
La simplicité de cet actuateur long de quelques centimètres qui se plie lorsqu’il est gonflé a ouvert la voie, théorique pour l’heure, à toutes sortes d’applications auparavant inimaginables. Un robot comestible pourrait par exemple se déguiser en proie pour étudier le comportement prédateur d’une espèce. Mélangé à des composés médicaux, le robot comestible pourrait servir à soigner l’intérieur du corps humain. Métabolisable, il pourrait devenir une source d’énergie qui parviendrait de manière autonome à des personnes en détresse, dans une crevasse par exemple. Mieux encore, puisque les matériaux comestibles peuvent générer de l’énergie électrique, ces robots comestibles pourraient avoir
la force de se manger eux-mêmes.
Nous n’en sommes pas encore là. Tant s’en faut. Toutefois, les fiançailles entre alimentation et robotique ont été scellées pour la première fois par la Commission européenne. Dans le cadre du programme Horizon 2020, elle a accordé un financement de 3,4 millions d’euros sur quatre ans au projet RoboFood qui a démarré en octobre dernier. Coordonné par le LIS, il regroupe, outre l’EPFL, l’Université de Bristol, l’Institut italien de technologie et l’Université de Wageningen aux Pays-Bas. C’est la première fois qu’un projet combine l’expertise des roboticiens et des spécialistes de l’alimentation.
Complètement novateur, RoboFood rassemble toutes les avancées réalisées à ce jour dans les deux domaines afin de créer tant des robots capables d’être mangés que des aliments qui se comportent comme des robots. Précisément, le projet « tirera parti des principes de la robotique molle et des méthodes avancées de traitement des aliments pour contribuer à ouvrir la voie à un nouvel espace de conception pour les robots comestibles et les aliments robotisés. De plus, il testera ces derniers avec des technologies de validation de principe pour la préservation des animaux, le sauvetage des êtres humains et la nutrition humaine. Ces robots pourraient un jour être utilisés pour aider les êtres humains et les animaux dans des situations d’urgence. »
Dans quatre ans, nous n’aurons pas de pizza autolivrée, de pilule qui atteindra toute seule notre estomac pour répandre ses bienfaits ni de transistors organiques imprimés au jet d’encre comestibles sur nos fraises. Mais à terme, RoboFood va ouvrir de nouvelles voies et les scientifiques ambitionnent de faire la preuve du concept. ■
Lien:
The new science and technology of edible robots and robotic food for humans and animals: www.robofood.org
Il y eut le bois, l’os, les liens de peaux. Puis le métal, les rivets, les vis et les boulons. Les mécanismes à remonter, ceux qui disposaient d’un moteur. Les régulateurs électroniques. Comme un enfant devant sa nouvelle boîte Lego ou Meccano, les constructeurs de machines se sont approprié les progrès technologiques afin d’améliorer, de complexifier leurs réalisations.
Le XXIe siècle est celui de l’émergence d’une nouvelle boîte à outils : celle des composants biologiques. Et leur exploitation se déploie dans de multiples directions, se basant sur de très nombreuses techniques, dont certaines sont encore dans leurs tout premiers balbutiements. On peut citer les plus courantes, telles que l’utilisation de bactéries ou de microorganismes pour dégrader, transformer ou produire des substances chimiques. Mais il en existe bien d’autres, plus disruptives, rendues possibles grâce à des percées réalisées en recherche fondamentale.
Ainsi, l’identification et la maîtrise des processus de fonctionnement des cellules souches a permis de franchir une étape clé : en 2009, pour la première fois, un « organoïde » complet a pu être créé in vitro. « Cela a été un choc pour beaucoup de biologistes », se rappelle Matthias Lütolf, chercheur à l’EPFL dans ce domaine. Mais cela aura surtout donné l’impulsion au développement de plusieurs de ces organes à échelle réduite.
En 2020, le laboratoire de Matthias Lütolf a présenté une portion d’intestin miniaturisée, créée en laboratoire en utilisant une technique de « bio-impression » qui dépose des cellules souches dans un gel de culture, selon une organisation spatiale précise. « A partir de là, la magie opère ! » explique le chercheur. Les cellules intestinales se développent d’elles-mêmes et s’organisent en 3D exactement comme celles d’un véritable intestin.
Cette technologie offre l’opportunité d’étudier la manière dont les substances (médicaments par exemple) interagissent avec la paroi intestinale. Dans certains cas, cela pourra remplacer les expérimentations animales. En outre, ces travaux offrent de nouvelles perspectives pour l’étude du microbiome, dont l’importance physiologique est de plus en plus reconnue.
La fabrication in vitro d’organes complets destinés à remplacer des organes déficients ou malades n’est toutefois pas pour demain. Mais peut-être pour après-demain ! « Notre travail montre que l’ingénierie des tissus peut servir à contrôler le développement des organoïdes et à fabriquer des organoïdes de nouvelle génération avec une forte pertinence physiologique, ce qui ouvre des perspectives fascinantes dans la modélisation des maladies, la découverte de médicaments, les diagnostics et la médecine régénérative», ajoute Matthias Lütolf.
Notre travail montre que l’ingénierie des tissus peut servir à contrôler le développement des organoïdes et à fabriquer des organoïdes de nouvelle génération avec une forte pertinence physiologique”
L’ingénierie génétique, un nouveau paradigme
Une autre technologie, née au tournant du XXIe siècle, ouvre des perspectives inouïes : l’ingénierie génétique, et particulièrement l’édition génétique CRISPR, qui a valu à Emmanuelle Charpentier et Jennifer Doudna le Prix Nobel de chimie en 2020. La différence est fondamentale : on ne doit plus se contenter de ce qu’une bactérie sait faire naturellement — on sait désormais modifier son génome de manière à lui faire réaliser la transformation chimique souhaitée.
Il s’agit, ni plus ni moins, d’un nouveau paradigme — une nouvelle dimension de la notion de « machine », dont les composants peuvent désormais être intégralement biologiques. La compétition internationale iGEM, à laquelle des étudiants de l’EPFL ont participé régulièrement — et avec succès — ces dernières années, explore justement divers déploiements possibles des techniques d’ingénierie génétique. Les équipes qui s’affrontent à l’iGEM ont par exemple planché sur la mise au point d’un virus à ARN capable d’infecter spécifiquement les criquets, dont les invasions sont responsables de graves famines en Afrique (un travail de TU Delft). Ou sur le contrôle des moisissures pour leur conférer des structures spécifiques grâce auxquelles elles pourront produire des matériaux de construction ou des carburants (DTU, Copenhague). Ou encore des tests diagnostiques basés sur des virus afin de détecter des infections. Et la liste est encore longue (voir 2020.igem.org).
Mais les projets utilisant l’édition génétique débordent largement le cadre de cette compétition. Très récemment, une équipe de chercheurs de Harvard a modifié le gène de bactéries E. coli pour que celles-ci puissent composer une « encre 3D programmable », un « matériau vivant, autoréparant », qu’ils imaginent pouvoir utiliser pour des constructions spatiales ou même terrestres. Leurs travaux ont été publiés dans Nature Communications le 23 novembre.
Vers la résurrection d’une espèce
A un autre degré, le projet Colossal de George Church, qui entend redonner vie au mammouth laineux, utilise les mêmes outils. A la pure démarche scientifique Church ajoute une visée utilitariste : les mammouths laineux seraient selon lui des alliés précieux dans la sauvegarde de la toundra sibérienne. Il s’agirait donc de fabriquer des animaux-outils — des machines biologiques de plusieurs tonnes…
Les bêtes qu’il compte créer sont toutefois des chimères : des éléphants comportant des traits de mammouths, obtenus en intégrant des portions d’ADN de mammouths congelés à celui de certaines espèces d’éléphants. Même si le projet paraît farfelu — et n’est pas sans rappeler Jurassic Park — la start-up de Church a obtenu cette année 15 millions de dollars de financement en capital-risque.

Organismes complexes sur mesure
Au vu de ces avancées, plus rien — sinon de nécessaires considérations éthiques — n’empêche d’imaginer l’étape suivante : la construction, maîtrisée, d’organismes biologiques complexes. Vivants. Capable, pourquoi pas, de se reproduire et d’évoluer.
Voilà ce qu’explore Alexandra Daisy Ginsberg, une artiste britannique et sud-africaine qui a dernièrement été exposée à EPFL Pavilions, dans le cadre de l’exposition Nature of Robotics. Plusieurs de ses projets, dont « Designing for the Sixth Extinction » présenté à l’EPFL, partent du constat que la perte de biodiversité due à l’action humaine est irréversible, mais qu’il est possible d’imaginer la création d’une « biodiversité synthétique », d’un nouveau « règne synthétique », grâce à l’ingénierie génétique. « L’arbre de la vie a toujours été en évolution. Nous sommes à l’ère où ce quatrième règne est en train d’émerger », explique Alexandra Daisy Ginsberg.
Cette perspective vous fait froid dans le dos ? Observez la forêt ci-contre. A défaut de ses microorganismes et de ses alliés naturels, victimes d’extinction et de nouveaux pathogènes, la forêt survit grâce aux organismes synthétiques mis au point pour compenser leur action. L’artiste explique : « Nous constatons déjà la disparition de certains pollinisateurs. Cela aura des conséquences sur d’autres espèces, qui s’éteindront aussi. Et si la biologie synthétique pouvait être utilisée pour sauver ces espèces ? » Ici, des sortes de limaces parcourent inlassablement le sol pour en faire baisser l’acidité; là, des formes inspirées du porc-épic recueillent des graines pour s’en aller les semer plus loin; sur les troncs des chênes, des baudruches croissent comme des champignons afin de combattre le pathogène responsable de la mort subite de ces arbres, une maladie déjà problématique aujourd’hui.
Tout cela impliquerait bien sûr de disséminer ces organismes synthétiques dans la nature. « Qu’est-ce que cela signifierait ? Mon travail explore les conséquences de l’émergence de ce nouveau règne », précise-t-elle. Parmi lesquelles les risques d’une prolifération incontrôlée. Pour l’éviter, Alexandra Daisy Ginsberg prévoit que ces créatures disposeront d’un mécanisme génétique d’autodestruction (« kill switch »). « Ce sont des questions qu’un jour où l’autre il faudra se poser sérieusement », insiste-t-elle.
L’imaginaire d’Alexandra Daisy Ginsberg a beau être prospectif et artistique, il est fondé sur de la vraie science. Comme souvent dans les œuvres d’anticipation ou de science-fiction, les visions d’artistes sont aussi un miroir à destination de leur lecteur-spectateur. Elles ont le pouvoir de l’emmener explorer les conséquences des progrès de l’humanité, que ceux-ci la conduisent vers un monde meilleur… ou à la catastrophe. En écho aux premiers artistes de l’humanité, qui ont ouvert ce « dossier », ceux d’aujourd’hui qui pensent à demain ne donnent pas seulement à voir la réalité qui nous entoure : ils explorent le futur — pour en débusquer les écueils. ■
La biologie synthétique permettra-t-elle de sauver des espèces menacées ?”